
Компоненты которые используться:

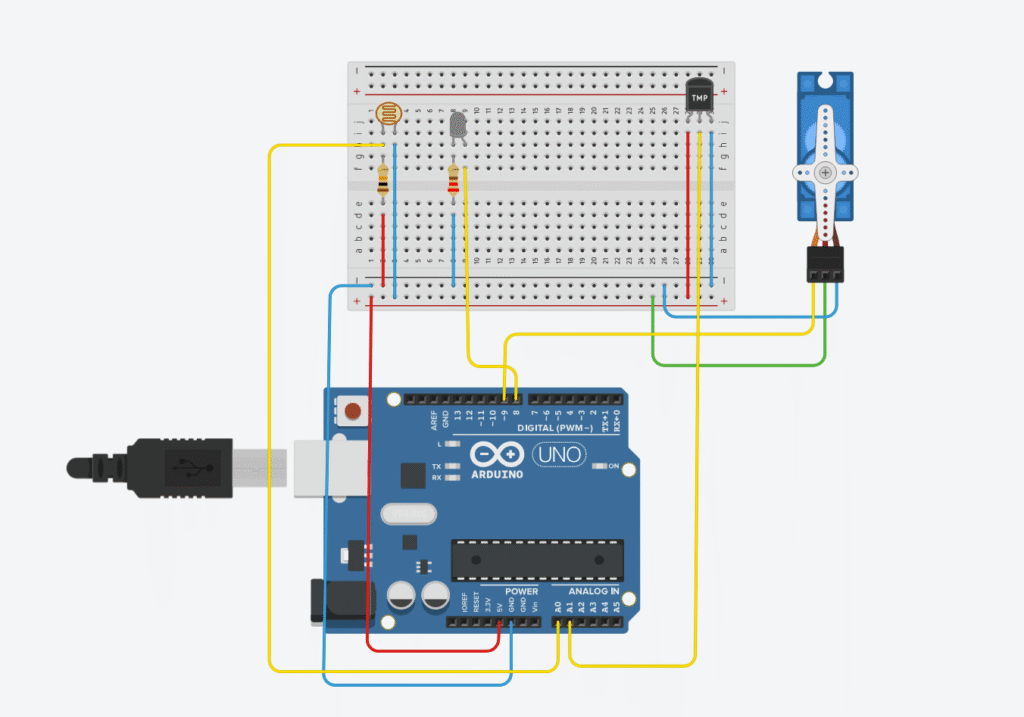
Cборкa:
#include <Servo.h>
const int tempPin = A1;
const int ldrPin = A0;
const int ledPin = 8;
const int servoPin = 9;
Servo windowServo;
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
windowServo.attach(servoPin);
}
void loop() {
//температуры
int tempValue = analogRead(tempPin);
float voltage = tempValue * (5.0 / 1023.0);
float temperature = (voltage - 0.5) * 100.0;
// серводвигателем
int angle = map(temperature, 302, 320, 0, 180);
angle = constrain(angle, 0, 180);
windowServo.write(angle);
//освещённости
int ldrValue = analogRead(ldrPin);
int threshold = 700;
if (ldrValue < threshold) {
digitalWrite(ledPin, HIGH); // Темно
} else {
digitalWrite(ledPin, LOW); // Светло
}
//информация
Serial.print("Temperatur: ");
Serial.print(temperature);
Serial.print(" °C | Level: ");
Serial.print(angle);
Serial.print(" | Filgt: ");
Serial.println(ldrValue);
delay(500);
}